
Yiting Chen 陈一霆
I am a Computer Science Ph.D. student at Rice University advised by Prof. Kaiyu Hang and a member of the Robotics and Physical Interactions Lab (RobotΠ Lab). My research interest generally lies in robot manipulation, specifically, enabling robots to perceive and change the configuration of the world through physical interactions under uncertainty.
Before joining Rice, I was a research intern at the Learning Algorithms and Systems Laboratory (LASA) at EPFL in Switzerland, working with Prof. Aude Billard. I did my B. Eng. in Mechanical Engineering at Wuhan University under the supervision of Prof. Miao Li, with a summer visit to The Chinese University of Hong Kong (CUHK). I obtained my M.Sc. in Electrical Engineering at Chalmers in Sweden, working with Prof. Yasemin Bekiroglu.
Short Bio
Google Scholar LinkedIn Twitter
News
[2025/10] The ManipulationNet project has been released. [2025/06] Three papers are all accepted by IROS 2025. [2025/04] One paper is accepted by RSS 2025.Research
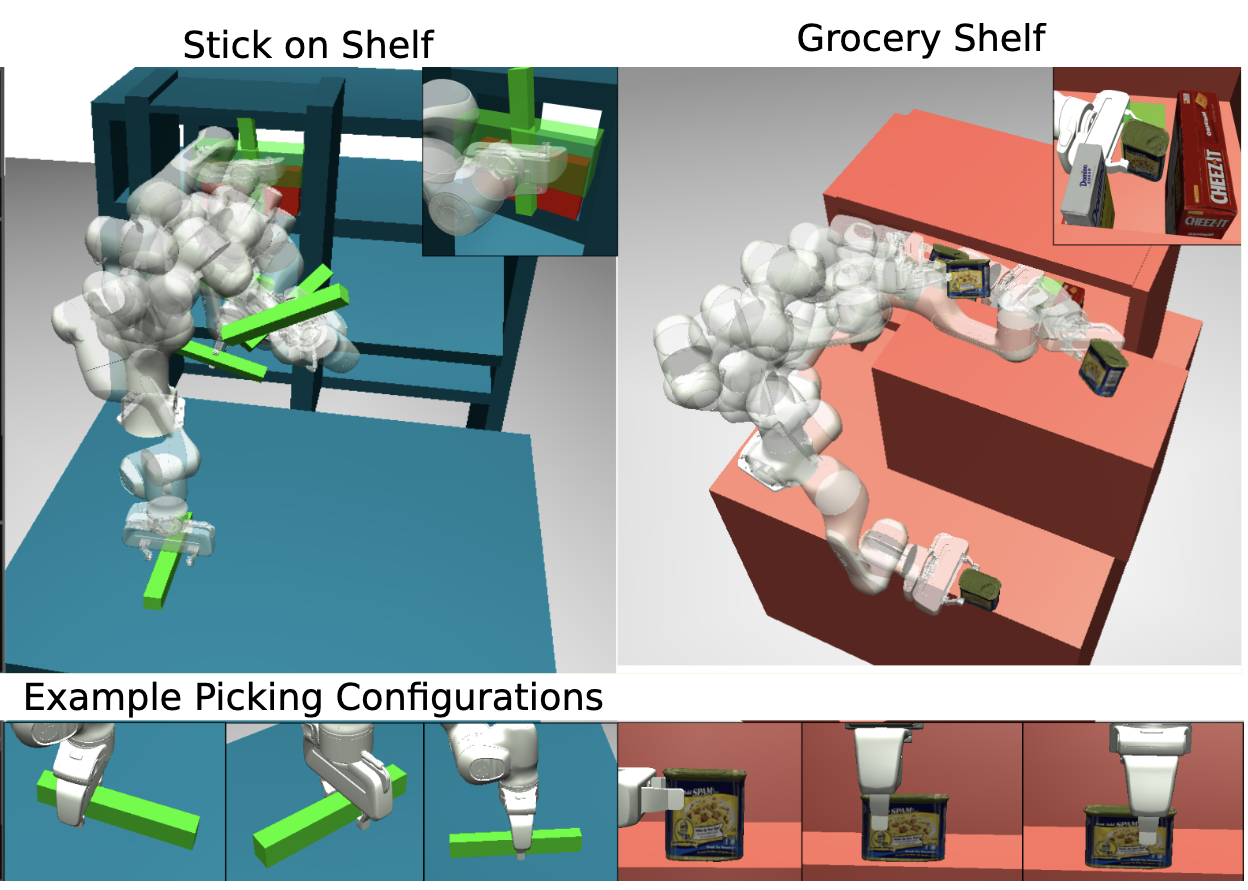
B4P: Simultaneous Grasp and Motion Planning for Object Placement via Parallelized Bidirectional Forests and Path Repair
Benjamin H. Leebron, Kejia Ren, Yiting Chen, Kaiyu Hang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, Hangzhou, China.
Paper
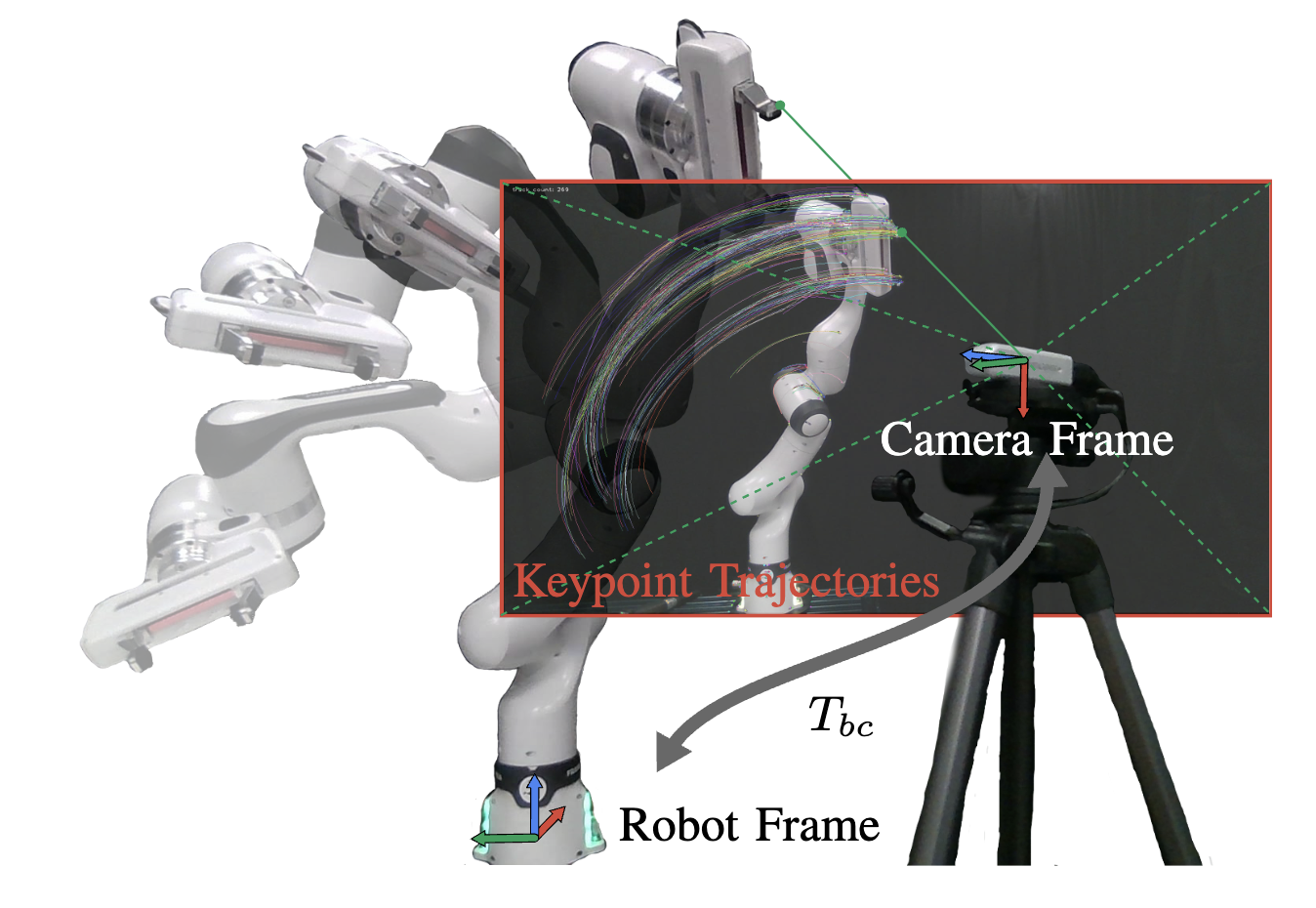
ARC-Calib: Autonomous Markerless Camera-to-Robot Calibration via Exploratory Robot Motions
Podshara Chanrungmaneekul, Yiting Chen, Joshua T. Grace, Aaron M. Dollar, Kaiyu Hang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, Hangzhou, China.
Paper
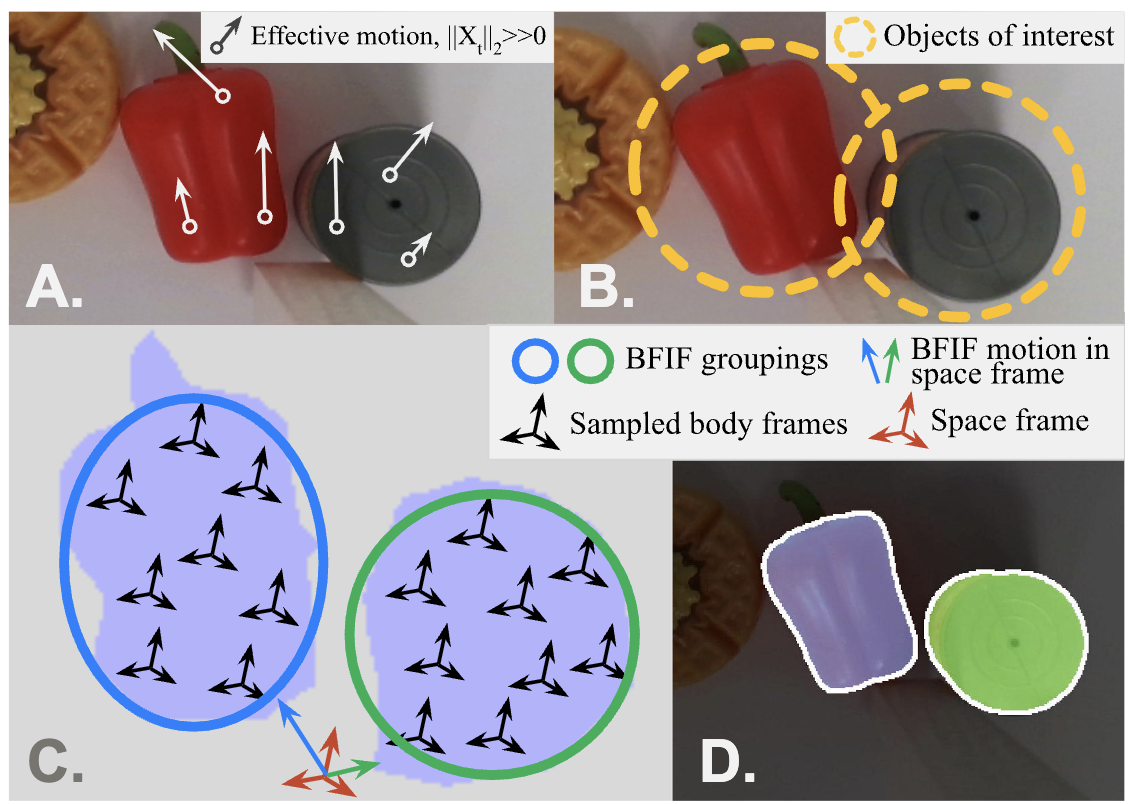
rt-RISeg: Real-Time Model-Free Robot Interactive Segmentation for Active Instance-Level Object Understanding
Howard H. Qian, Yiting Chen, Gaotian Wang, Podshara Chanrungmaneeku, Kaiyu Hang
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, Hangzhou, China.
Paper
Robust Peg-in-Hole Assembly under Uncertainties via Compliant and Interactive Contact-Rich Manipulation
Yiting Chen, Kenneth Kimble, Howard H. Qian, Podshara Chanrungmaneekul, Robert Seney, Kaiyu Hang
Robotics: Science and Systems (RSS) 2025, Los Angeles, USA.
Paper
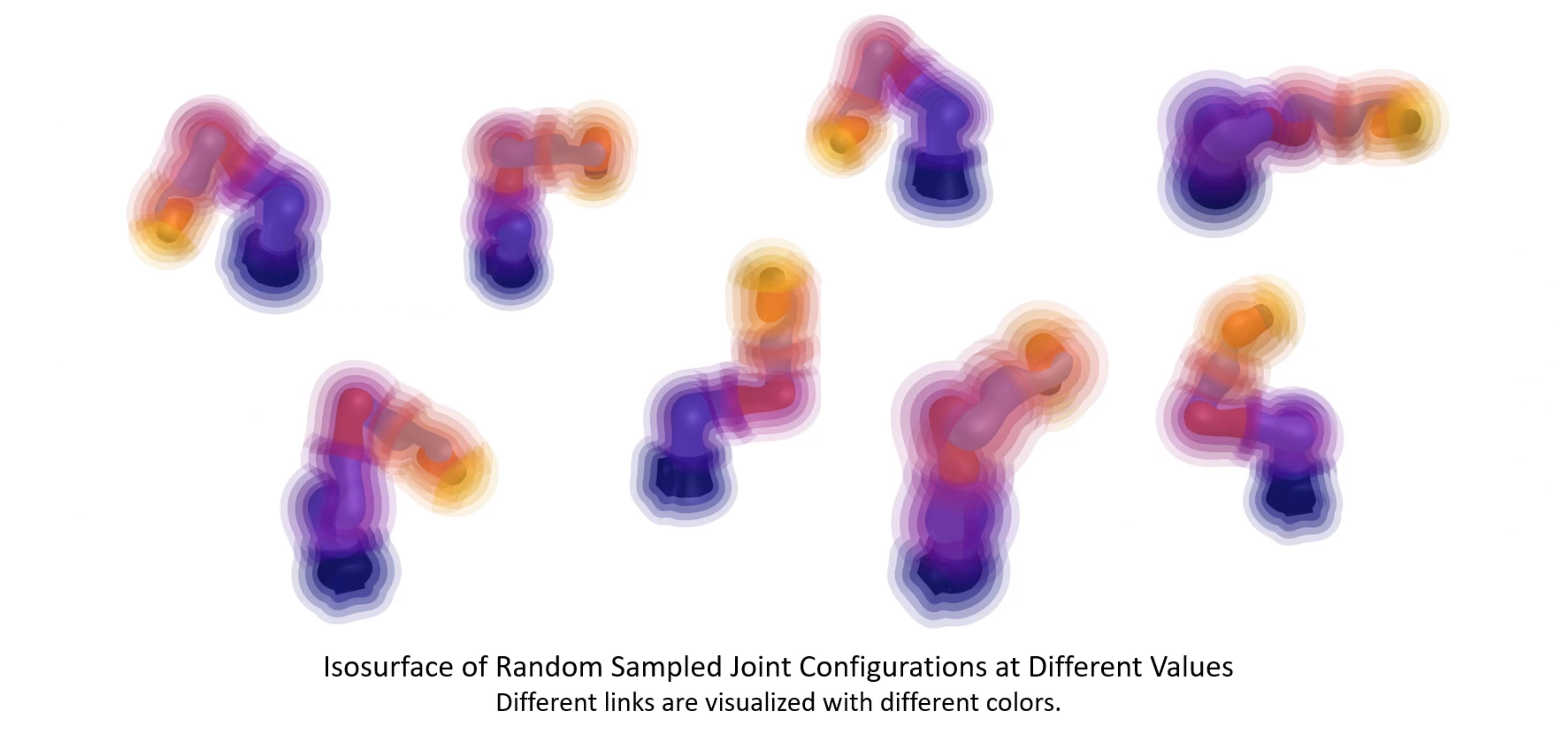
Implicit Articulated Robot Morphology Modeling with Configuration Space Neural Signed Distance Functions
Yiting Chen, Xiao Gao, Kunpeng Yao, Loïc Niederhauser, Yasemin Bekiroglu, Aude Billard
IEEE International Conference on Robotics and Automation (ICRA), 2025, Atlanta, USA.
Paper •
Code
Sliding Touch-Based Exploration for Modeling Unknown Object Shape with Multi-Fingered Hands
Yiting Chen, Ahmet Ercan Tekden, Marc Peter Deisenroth, Yasemin Bekiroglu
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023, Detroit, USA.
Paper •
Poster
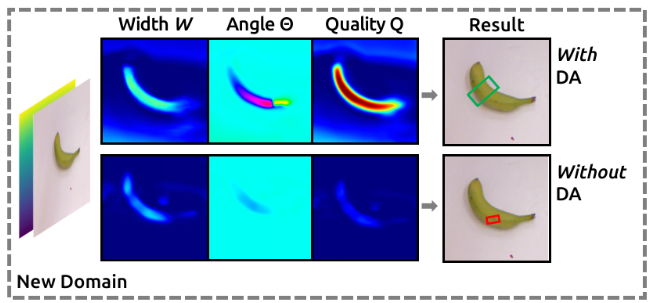
Deep Grasp Adaptation through Domain Transfer
Yiting Chen, Junnan Jiang, Ruiqi Lei, Yasemin Bekiroglu, Fei Chen, Miao Li
IEEE International Conference on Robotics and Automation (ICRA), 2023, London, UK.
Paper •
Poster
Robot Cooking With Stir-Fry: Bimanual Non-Prehensile Manipulation of Semi-Fluid Objects
Junjia Liu, Yiting Chen, Zhipeng Dong, Shixiong Wang, Sylvain Calinon, Miao Li, Fei Chen
IEEE Robotics and Automation Letters (RA-L), 2022, 7.2 (2022): 5159-5166.
Paper •
Code •
Covered by TechXplore
Learning Robotic Ultrasound Scanning Skills via Human Demonstrations and Guided Explorations
Xutian Deng, Yiting Chen, Fei Chen, Miao Li
IEEE International Conference on Robotics and Biomimetics (ROBIO), 2021, Sanya, China.
Paper •
T.J. Tran Best Paper in Robotics Award, Finalist
{kind=link}
Selected Awards
- Geyer-Vardi Scholar, Department of Computer Science, Rice University, 2024
- EPFL Excellence in Engineering (E3) Fellowship, École Polytechnique Fédérale de Lausanne (EPFL), 2023
- Avancez Scholarship, Chalmers University of Technology, 2022 - 2024
- Ranked 4th in Simulation Branch, ICRA 2022: Open Cloud Robot Table Organization Challenge (OCRTOC), 2022
- T.J. Tran Best Paper in Robotics Award (Finalist), IEEE International Conference on Robotics and Biomimetics (ROBIO), 2021
- Real Robot Stage Finalist, IROS 2020: Open Cloud Robot Table Organization Challenge (OCRTOC), 2020